사출 공정에서 사출기와 금형 만큼이나 필수 장비로 인식되는 취출로봇(Take-out robots) 에 대해 알아봅시다.
취출로봇(Take-out robots) 이란?
취출(取出)이란 “잡아서 뺀다”는 뜻으로 사출기에서 성형이 완료된 플라스틱 제품을 빼내는 로봇을 취출 로봇이라고 합니다. 사실 취출 로봇 없이 작업자를 투입하거나 자유 낙하 방식으로도 사출 성형품을 만들 수는 있지만 인건비도 그렇고 사이클타임이나 제품 품질 등 취출로봇이 월등이 유리하기 때문에 오늘날 대부분의 사출기에 탑재되고 있습니다.

취출 로봇은 일반적으로 생각하는 로봇에 비해 구조가 단순하고 X,Y,Z 3축의 직교 방향으로 단순 반복 동작을 하도록 이루어져 있습니다. 또한 설치 시 사출기와 시그널 라인을 연결하기 때문에 금형 개폐, 냉각, 에젝터 전진 등의 공정 상황을 통신으로 주고 받으며 동작합니다. 사출 공정 조건에 맞춰 취출로봇의 대기 위치, 취출 하강 및 상승 위치, 제품 낙하 위치 등의 정보를 세팅해두면 로봇은 사출품을 꺼내 모아 놓고 사출기는 제품 생산을 반복하게 됩니다. 대부분의 생산 라인에서는 취출품의 하강 위치에 컨베이어를 두어 제품 이송까지 자동화하는 방식으로 현장의 작업자 수를 줄이고 있습니다.

과거의 취출 로봇은 단순하게 제품을 꺼내는 역할만 했으나 기술의 발전으로 취출 로봇의 활용도가 높아지고 있습니다. 제품 카운팅, 중량 측정, 금형 온도 측정 등의 간단한 기능은 물론이며 각 성형품을 조립하거나 성형품에 너트 등의 부품 삽입 또는 표면처리 등의 후속 가공도 가능하게 되었습니다.
취출 로봇(Take-out robots)의 구조
취출 로봇의 구조는 크게 3축과 컨트롤 유닛, 밸브 유닛으로 이루어져 있습니다.
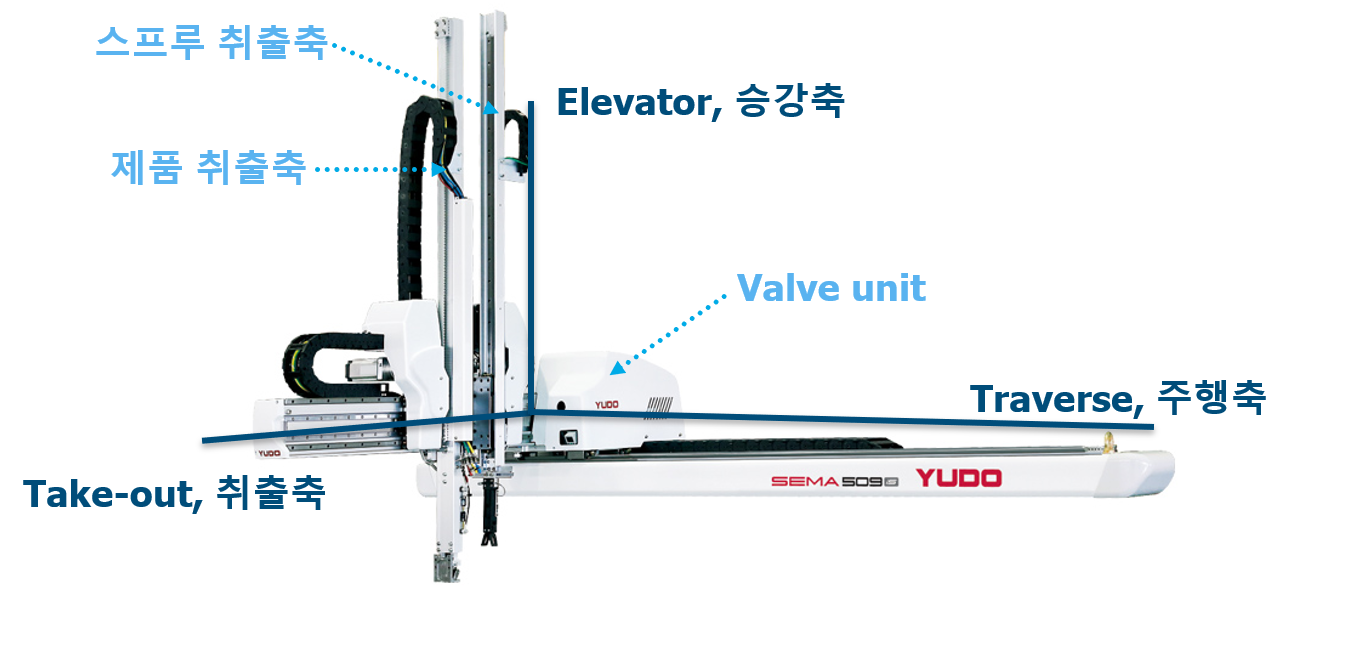
- 주행축: 사출기 밖으로 이동하는 축입니다.
- 상하축: 금형 위에서 대기했다가 성형이 완료되어 금형이 열리면 안으로 진입하여 제품을 꺼내는 축입니다. 기종에 따라 상하축이 2개가 있는 로봇이 있는데, 이는 각각 제품과 런너를 취출하는 역할을 합니다.
- 전후축: 사출기 위를 주행하는 이동하는 부분으로 원점에서 금형 위까지 왕복하는 축입니다.
- Valve Unit: 로봇의 동작과 제품 흡착 시 필요한 공압을 생성하고 컨트롤하는 역할을 합니다.
- Control Unit: 로봇의 통합 제어와 명령을 입력하는 장치로 일종의 리모컨으로 볼 수 있습니다.
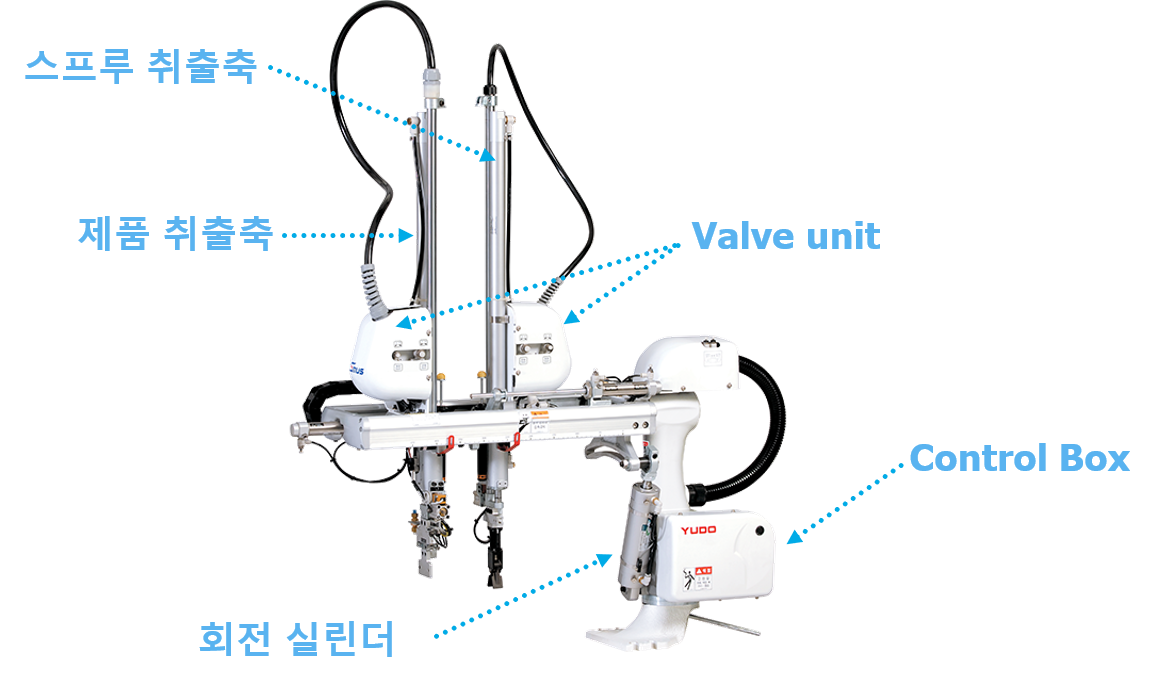
작은 타입의 스윙 로봇도 기본적인 구조는 비슷합니다.
- 상하축: 금형 위에서 대기했다가 성형이 완료되어 금형이 열리면 안으로 진입하여 제품을 꺼내는 축입니다. 기종에 따라 축이 2개가(스프루 취출축, 제품 취출축) 있는 로봇이 있는데, 이는 각각 제품과 런너를 취출하는 역할을 합니다.
- 회전실린더: 로봇을 회전시켜 사출기 밖으로 이동시키는 축입니다.
- Valve Unit: 로봇의 동작과 제품 흡착 시 필요한 공압을 생성하고 컨트롤하는 역할을 합니다.
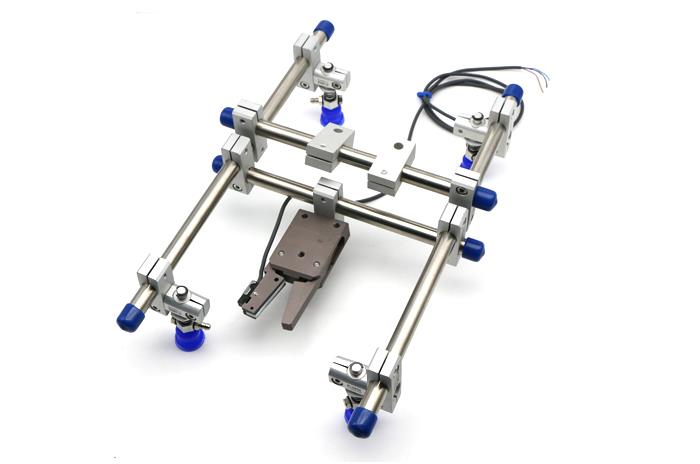
척킹 Chucking / 지그 JIG 는 상하축에 장착되어 제품을 금형에서 꺼내는 장치입니다. 고무 패드로 흡착 또는 집게로 집어 꺼내는 방식을 기본으로 사출품에 따라 금형 내 위치에 맞춰 전용 지그를 제작해야 합니다.

베이스 (Sub base)는 취출 로봇을 사출기에 설치 할 때 연결하는 금속 구조물입니다. 사출기 및 취출 로봇에 맞춰 홀 크기와 위치를 맞춰 설계해야 하며 로봇 상하축의 길이와 취출품에 따라 높이를 설정해야 합니다. 베이스의 치수가 금형/사출기/취출로봇 모델에 의해 달라지기 때문에 일종의 커스텀 품목으로 볼 수 있습니다.
취출로봇(Take-out robots)의 분류
취출 로봇은 구동 방식에 따라 스윙 타입, 실린더, 모터, 등으로 나눌 수 있습니다. 일부 현장에서는 다관절 로봇을 사용하기도 하지만 사출 전용 로봇이 아니기 때문에 이는 생략하겠습니다.

스윙 타입은 주행축이 없는 대신 회전 실린더가 로봇을 회전시켜 사출기 밖으로 제품을 밖으로 꺼내는 로봇입니다. 대부분 소형 사출기에서 사용하며 취출품 역시 작고 가벼운 제품들을 담당하죠. 로봇 자체의 사이즈가 작은 것은 물론이며 구조가 상당히 단순하고 조작법 또한 쉬운 편입니다.

실린더 (공압 구동 계통) 타입은 상하축, 주행축, 전후축 중 한 개 이상의 축을 공압 실린더를 사용하여 구동하는 로봇입니다. 상대적으로 장비 가격이 저렴하며 제어 및 구동이 단순하여 조작이 쉽다는 장점이 있지만, 실린더 동작 위치를 Stopper 등 물리적으로 제어하기 때문에 동작의 정밀도가 낮고 내구성에 제한이 있다는 단점이 있습니다. 또한 실린더 특성상 동작 속도 제어 및 고출력 구동이 어렵습니다.

모터 (전력 구동 방식) 타입은 상하축, 주행축, 전후축 전부 AC/Linear 서보 모터로 구동하는 타입입니다. 로봇의 동작 및 위치를 mm 단위로 정밀하게 제어 할 수 있으며 고속으로 운동하지만 가격이 비싸다는 단점이 있습니다.
'사출 > 사출 이론' 카테고리의 다른 글
| 사출 공정 필수 장비, 금형 온도 조절 장치 (mold temperature controller) 알아보기 (0) | 2022.06.29 |
|---|---|
| 핫 런너 시스템에 대해 알아보기-3 시스템의 구성요소(2) (0) | 2022.05.26 |
| 사출 주변기기 알아보기, 사출 공정에서 사용하는 장비의 종류와 용도 (0) | 2022.03.14 |
| 핫 런너 시스템(hot runner system)에 대해 알아보기-3 핫런너 구성요소(1) (0) | 2022.02.18 |
| 핫 런너 시스템(hot runner system)에 대해 알아보기-2 핫 러너 시스템의 종류, 분류 (0) | 2022.02.09 |



